Recovery of Artificial Shapes
Recovery from real images
Conflict between Simplicty and binocular disparity
Model
3D Scene Recovery
Symmetry Detection
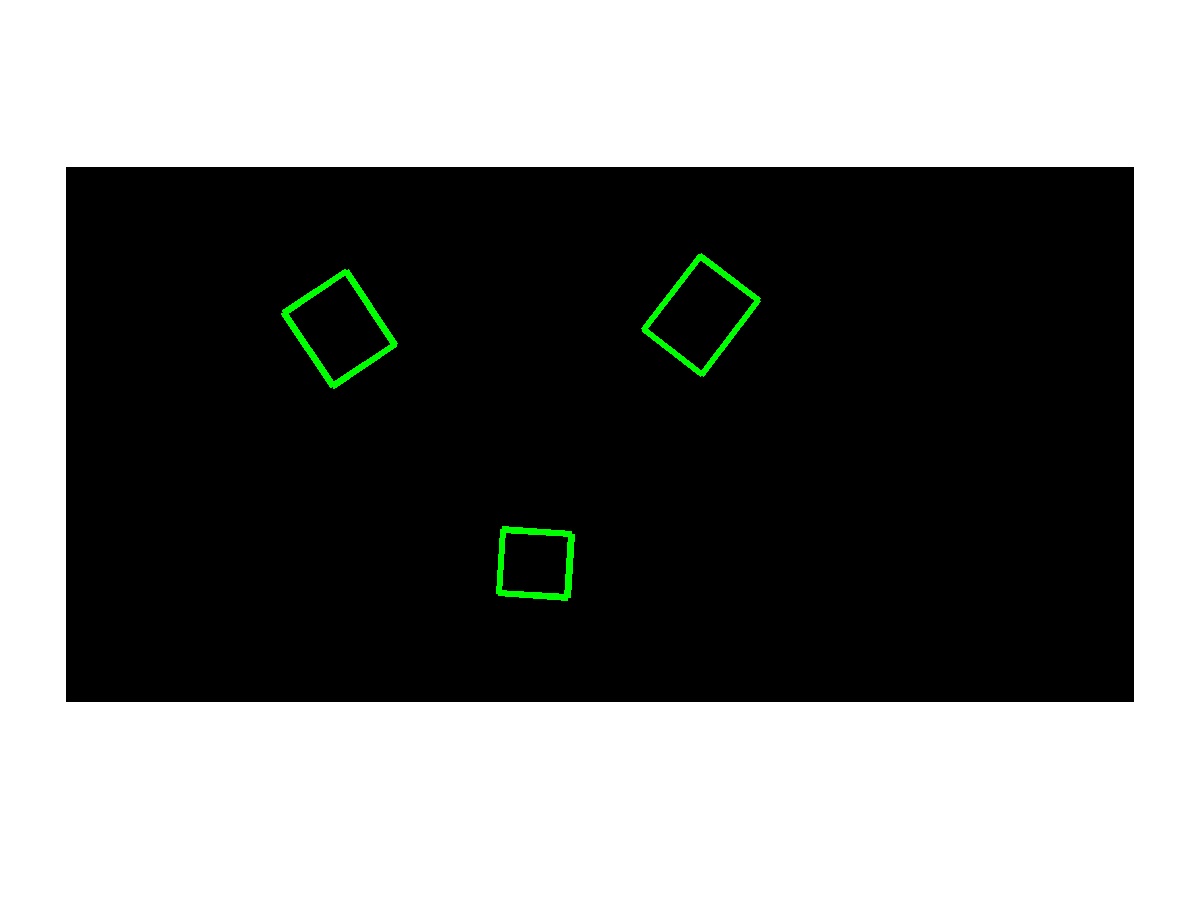
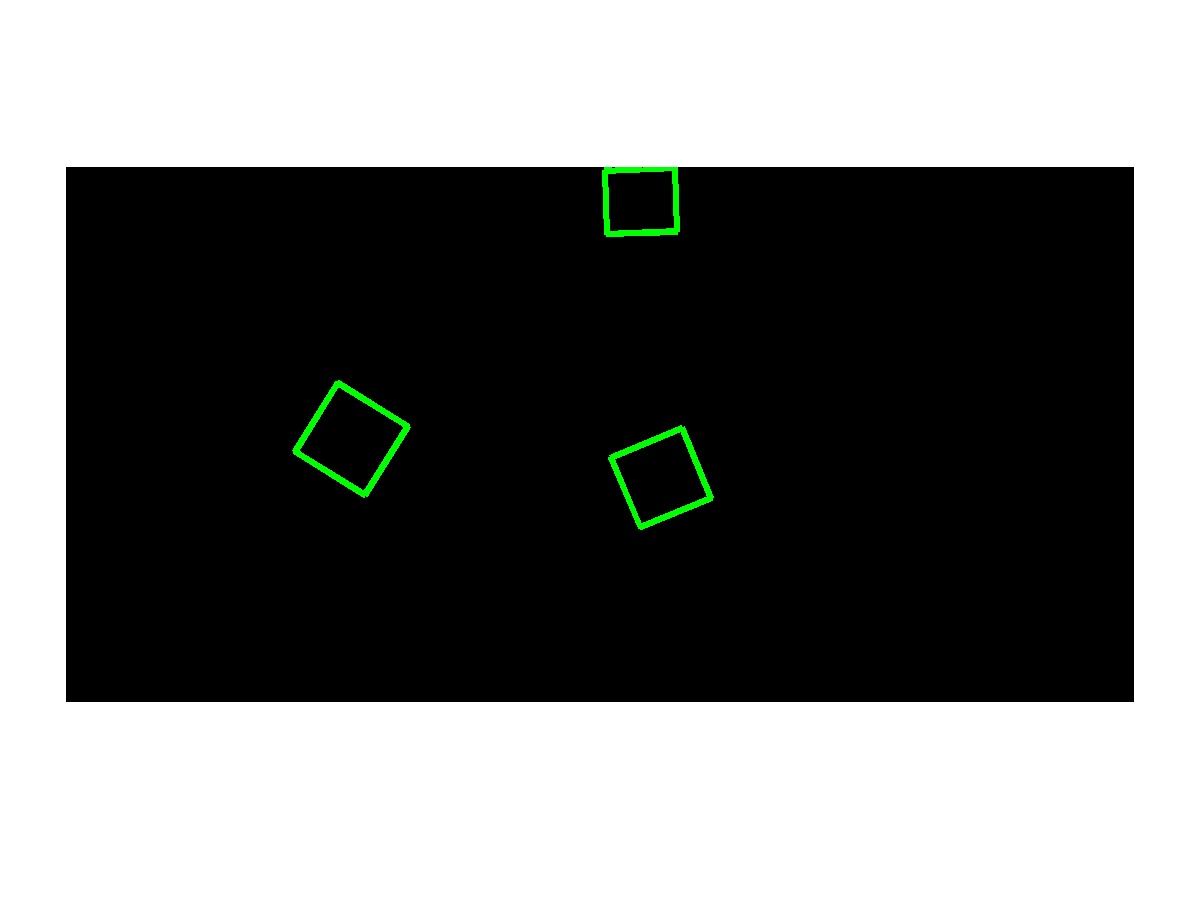
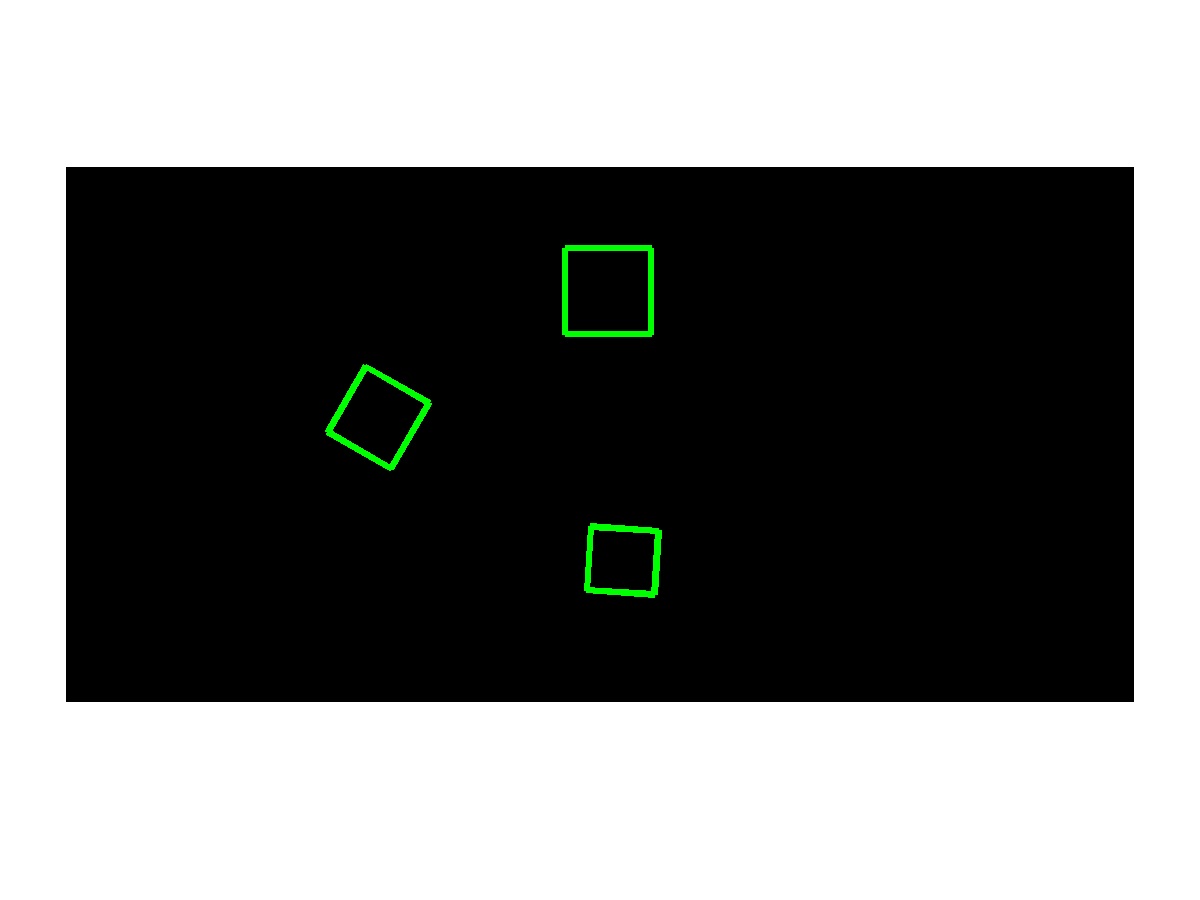
Object Detection
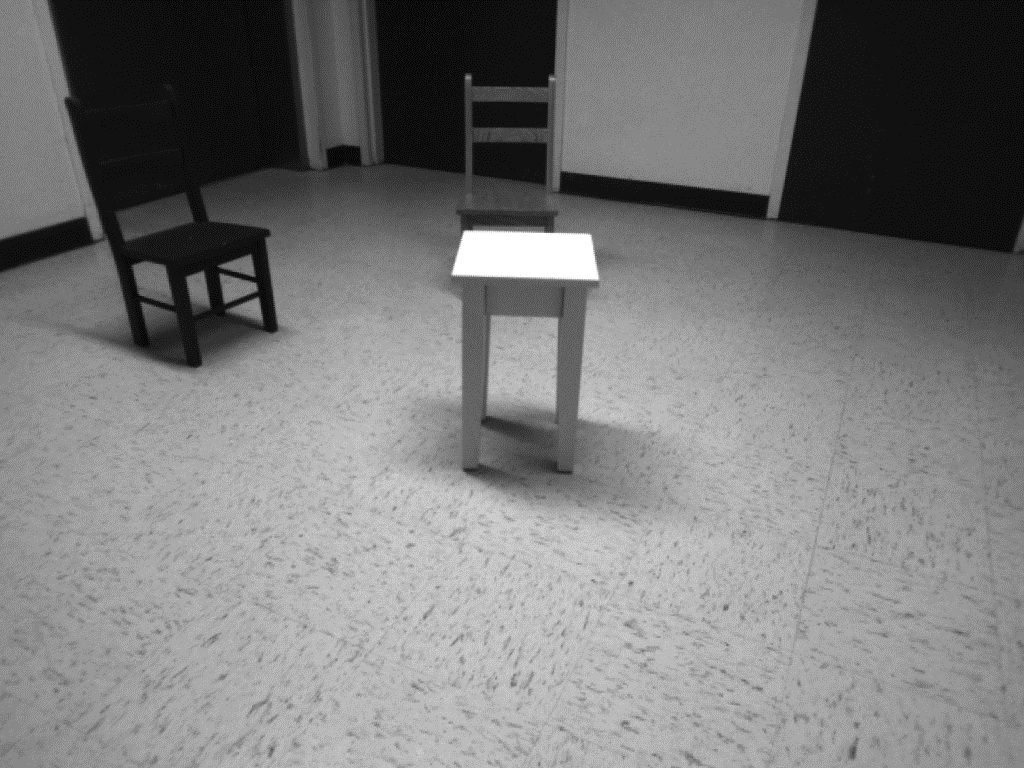
Robot Navigation
Image taken by Robot Camera
Detected objects
Walking around the closest object